



- Tel: +972-54-5376124
- Fax: +972-77-3457370
- E-mail: sales@testview.co.il

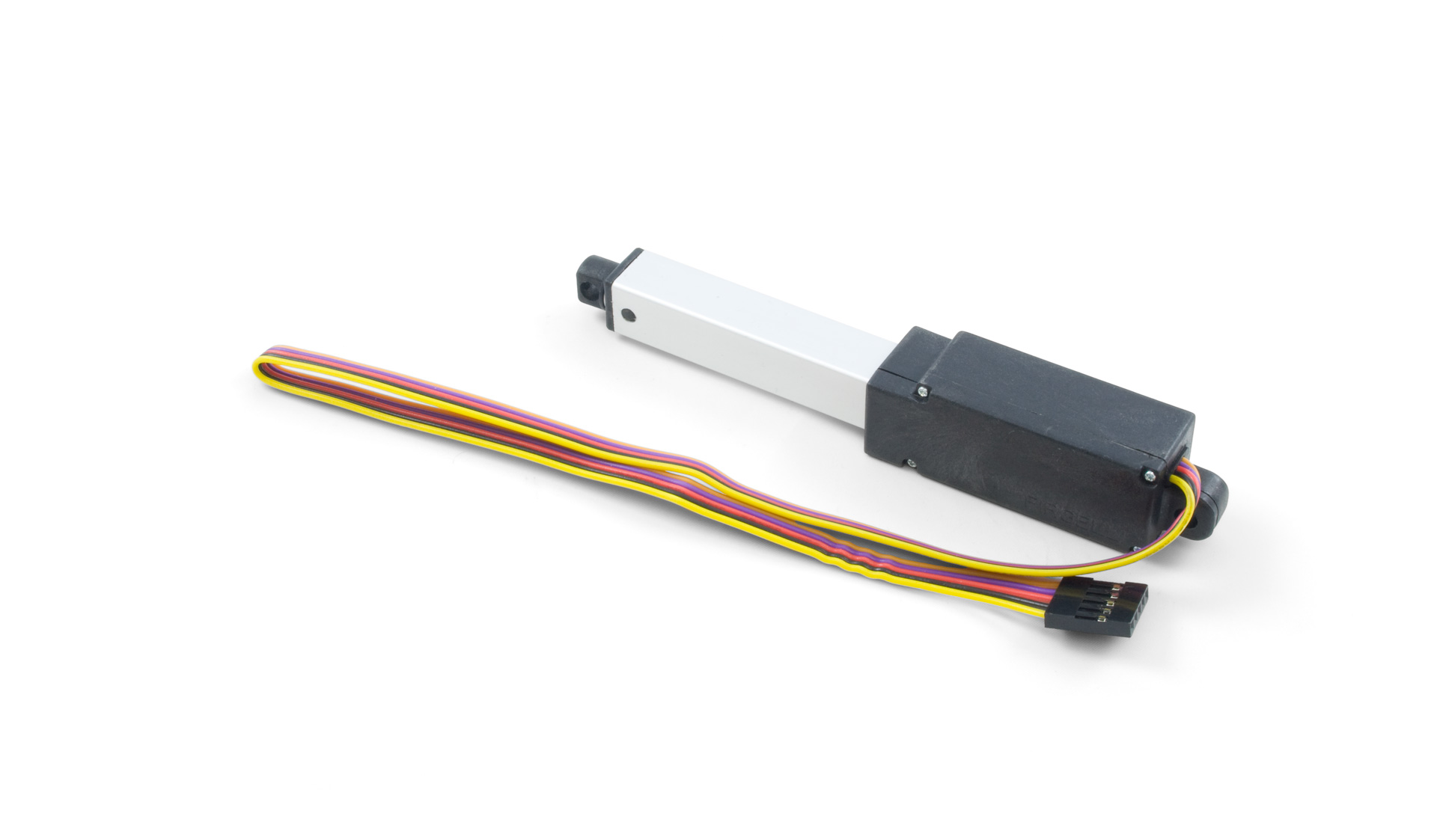



The Actuonix L16 series of linear actuators are compact DC motors geared to push or pull loads along the stroke of the actuator. This actuator comes with a built-in potentiometer, allowing your application to monitor the actuator’s position.
The 3573 linear actuator has a stroke length of 50mm and a 63:1 gearbox. It is able to move at a rate of 20 mm/s and can exert up to 75N of force at lower speeds.
In order to connect this actuator to a terminal block, you’ll need to cut off the 5-pin connector and strip the wires. For more details, see the “Compatible Products” tab.
This actuator does not have built-in limit switches, so you may damage the motor or gears if you run the actuator beyond its minimum or maximum stroke. We recommend using the actuator’s built-in potentiometer in your program to ensure that the motor is shut off whenever the potentiometer voltage gets close to 0V or 5V. Have a look at the “Resources” tab for a link to a project that implements a control loop using the potentiometer value.
| Motor Properties | |
|---|---|
| Motor Type | DC Linear Actuator |
| Stroke Length | 50 mm |
| Maximum Speed | 20 mm/s |
| Peak Power Point | (@ 10 mm/s) 75 N |
| Peak Efficiency Point | (@ 15 mm/s) 38 N |
| Gear Ratio | 63:1 |
| Positional Error Max | 300 ?¼m |
| Electrical Properties | |
| Rated Voltage | 12 V DC |
| Potentiometer Impedance | 9 k?© |
| Physical Properties | |
| Gear Train Material | Metal |
| Backdrive Force | 46 N |
| Side Force Max | 40 N |
| Wire Length | 350 mm |
| Weight | 56 g |
| Operating Temperature Min | -10 ?°C |
| Operating Temperature Max | 50 ?°C |
| IP Rating | IP54 |
You’ll need a motor controller to get control of the position of this actuator. In order to connect it to a controller, attach the red wire to the “+” terminal on the controller, and the black wire to the “-” terminal.
If you decide to use a motor controller with an analog input, you can connect the integrated potentiometer by soldering the wires to a Phidget cable and connecting it to the input. If you decide to use a stand-alone motor controller, you’ll also need a device with an analog input to read the potentiometer.
| Product | Controller Properties | Electrical Properties | Board Properties | ||
|---|---|---|---|---|---|
| Part Number | Number of Motor Ports | Velocity Resolution | Acceleration Resolution | Continuous Motor Current Max | Controlled By |
| 1064_1B | 2 | 0.79 % Duty Cycle | 1.9 % Duty Cycle/s | (per motor) 14 A | USB (Mini-USB) |
| 1065_0B | 1 | 0.39 % Duty Cycle | 24.5 % Duty Cycle/s | 5 A | USB (Mini-USB) |
| DCC1000_0 | 1 | 0.001 % Duty Cycle | 1 % Duty Cycle/s | 25 A | VINT |
To easily connect the internal potentiometer to an IO board we recommend you use a Phidget cable. Just cut off the ends of one of the cables and connect the red wire to potentiometer power, the black wire to potentiometer ground, and the white wire to the potentiometer wiper as described in the table below. You can solder multiple cables together in order to make even longer Phidget cables, but you should be aware of the effects of having long wires in your system.
| Wire Color | Function |
|---|---|
| Orange | Potentiometer Ground |
| Purple | Potentiometer Wiper |
| Red | Actuator Motor Power |
| Black | Actuator Motor Ground |
| Yellow | Potentiometer Power |

